O projekcie DARTS-PL

Celem projektu DARTS-PL jest opracowanie krajowej bazy scenariuszy testowych dla pojazdów autonomicznych (AV), uwzględniających warunki drogowe charakterystyczne dla Polski.
Projekt realizowany jest w konsorcjum naukowym Instytutu Transportu Samochodowego (Lider) z Wydziałem Elektroniki i Technik Informacyjnych Politechniki Warszawskiej.
DARTS-PL zakłada wykonanie:
- rejestracji scenariuszy drogowych zawierających konkretne przykłady odcinków dróg w Polsce, a następnie
- wykonanie wysokiej jakości adnotacji dla klas obiektów zarejestrowanych w materiale.
Każdy odcinek pomiarowy jest rejestrowany kilkukrotnie – w różnych warunkach pogodowych, oświetleniowych i drogowych.
Baza zawiera zsynchronizowane próbki danych z kilku rodzajów sensorów: IMU, GPS, kamer, lidarów i radarów. W ramach projektu rozwijana jest też autorska metoda opracowania adnotacji wspomagana metodami sztucznej inteligencji, fuzji danych, automatycznej detekcji i śledzenia obiektów oraz algorytmami aktywnego uczenia.
Adnotacje zostaną wykonane dla m.in.:
- pojazdów,
- pieszych,
- rowerzystów,
- innych form transportu na drodze, oraz
- elementów infrastruktury.
Projekt został sfinansowany przez Narodowe Centrum Badań i Rozwoju w ramach umowy nr GOSPOSTRATEG-VIII/0001/2022. Podmiotem nadzorującym wykonanie projektu jest Ministerstwo Infrastruktury – Departament Strategii Transportu.
DARTS-PL zakłada wykonanie:
- rejestracji scenariuszy drogowych zawierających konkretne przykłady odcinków dróg w Polsce, a następnie
- wykonanie wysokiej jakości adnotacji dla klas obiektów zarejestrowanych w materiale.
Każdy odcinek pomiarowy jest rejestrowany kilkukrotnie – w różnych warunkach pogodowych, oświetleniowych i drogowych.
Baza zawiera zsynchronizowane próbki danych z kilku rodzajów sensorów: IMU, GPS, kamer, lidarów i radarów. W ramach projektu rozwijana jest też autorska metoda opracowania adnotacji wspomagana metodami sztucznej inteligencji, fuzji danych, automatycznej detekcji i śledzenia obiektów oraz algorytmami aktywnego uczenia.
Adnotacje zostaną wykonane dla m.in.:
- pojazdów,
- pieszych,
- rowerzystów,
- innych form transportu na drodze, oraz
- elementów infrastruktury.
Projekt został sfinansowany przez Narodowe Centrum Badań i Rozwoju w ramach umowy nr GOSPOSTRATEG-VIII/0001/2022. Podmiotem nadzorującym wykonanie projektu jest Ministerstwo Infrastruktury – Departament Strategii Transportu.

Dla kogo tworzymy bazę DARTS-PL?
Baza DARTS-PL jest przeznaczona dla inżynierów, techników i firm zajmujących się problemami sterowania pojazdami zautomatyzowanymi.
Celem utworzenia bazy DARTS-PL jest zwiększenie dostępności wysokiej jakości danych do wykorzystania w pracach naukowych i rozwojowych. Może zostać zastosowana zarówno jako element rozwoju metod detekcji i klasyfikacji obiektów w zbiorach danych (video, radarowych i lidarowych), jak i rozwoju algorytmów planowania ruchu i sterowania pojazdów zautomatyzowanych. Baza zostanie udostępniona zainteresowanym podmiotom na zasadzie non-profit.
Zestaw pomiarowy
Superset sensorów.
Rejestracja przestrzeni 360°.
4
LiDARy
Ouster OS1 i Ouster OS2 umieszczone centralnie w osi pojazdu, rejestrujące obraz 360° wokół niego
2 Ouster OS Dome umieszczone skośnie przy krawędziach bocznych pojazdu, tak aby uzupełniać zbiór danych o obiekty
w bliskim sąsiedztwie pojazdu pomiarowego
2 Ouster OS Dome umieszczone skośnie przy krawędziach bocznych pojazdu, tak aby uzupełniać zbiór danych o obiekty
w bliskim sąsiedztwie pojazdu pomiarowego
7
kamer
7 kamer DS-CAM-640C, z których 6 stanowi system
o charakterystyce
i rozmieszczeniu pozwalającym na obserwację przestrzeni 360° wokół pojazdu, a jedna dodatkowo skierowana jest centralnie, aby dokładniej rejestrować obszar przed pojazdem
o charakterystyce
i rozmieszczeniu pozwalającym na obserwację przestrzeni 360° wokół pojazdu, a jedna dodatkowo skierowana jest centralnie, aby dokładniej rejestrować obszar przed pojazdem
6
RADARów
2 radary Smartmicro DrveGrd 152 rejestrujące przestrzeń przed i za pojazdem w dalekim dystansie
4 radary Smartmicro DrveGrd 169 umieszczone w narożnikach pojazdu i pozwalające na rejestrację obiektów w bliskiej odległości
4 radary Smartmicro DrveGrd 169 umieszczone w narożnikach pojazdu i pozwalające na rejestrację obiektów w bliskiej odległości
1
moduł IMU-GPS-RTK
Jednostka pomiaru inercyjnego o częstotliwości próbkowania 1000 Hz
z modułem lokalizacji (GPS) oraz usługą RTK
o dokładności 1 cm
z modułem lokalizacji (GPS) oraz usługą RTK
o dokładności 1 cm
1
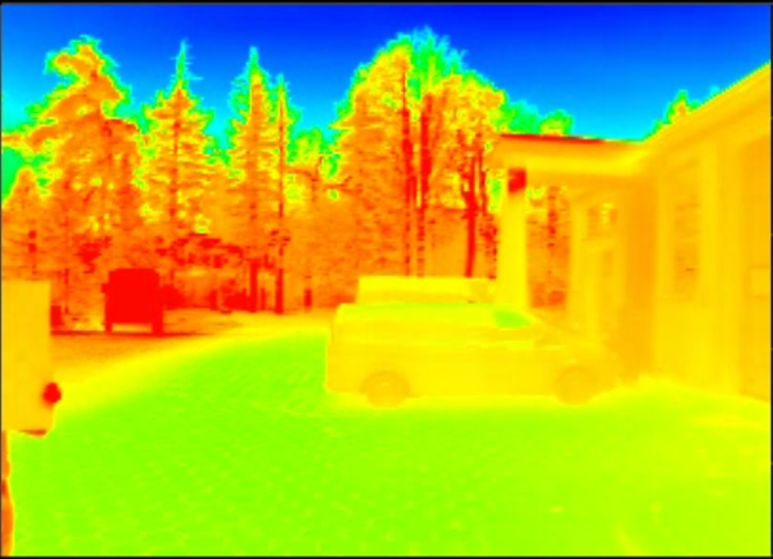
kamera termowizyjna
Optris IR camera umieszczona centralnie w osi pojazdu, rejestrująca sytuację drogową przed nim, zapewnia dodatkowe źródło danych, szczególnie potrzebne przy niekorzystnych warunkach pogodowych
Zobacz jak poszczególne sensory postrzegają otoczenie


Baza scenariuszy testowych
Potrzebujesz więcej informacji?
Skontaktuj się z nami!

